Подключение кнопки к линии порта ввода/вывода
Изучив данный материал, в котором все очень детально и подробно описано с большим количеством примеров, вы сможете легко овладеть и программировать порты ввода/вывода микроконтроллеров AVR.
Пример будем рассматривать на микроконтроллере ATMega8 .
Программу писать будем в Atmel Studio 6.0 .
Эмулировать схему будем в Proteus 7 Professional
.
Самой распространенной задачей при создании проектов для микроконтроллеров является подключение кнопок. Несмотря на простоту, эта задача имеет существенные, возможно и неочевидные особенности.
Если подключить один из контактов кнопки, например, к общему проводу («земле»), а второй к выбранной линии порта ввода/вывода микроконтроллера, который переключен в режим «Вход», то выяснится, что такой метод не работает. При нажатии кнопки линия порта микроконтроллера соединяется с землей, и программа будет считывать лог.«0» с этой линии порта ввода/вывода, но при отпущенной кнопке вывод микроконтроллера не будет соединен ни с чем, что часто и называют «висит в воздухе». В таком случае программа будет считать с вывода и лог.«0» и лог.«1» случайным образом, так как на не к чему не присоединённую линию порта ввода/вывода будут наводится наводки.
Правильное подключение предполагает, что в разомкнутом состоянии вывод микроконтроллера должен быть соединен через резистор, например с шиной питания, а в замкнутом - с землей, либо наоборот. Сопротивление резистора не должно быть слишком маленьким, чтобы ток, текущий через него при замкнутых контактах кнопки не был слишком большим. Обычно используют значения порядка 10-100 кОм.
Рис: Подключения кнопки с подтянутой шиной питания.
- при отжатой кнопке равно лог.«1»;
- при нажатой кнопке равно лог.«0»;

Рис: Подключения кнопки с подтянутой землей.
При таком подключении состояние линии порта ввода вывода будет:
- при отжатой кнопке равно лог.«0»;
- при нажатой кнопке равно лог.«1»;
- подключения к линии порта ввода/вывода кнопки с подтянутой шиной питания:

- подключения к линии порта ввода/вывода кнопки с подтянутой землей:

// Подключаем внешние библиотеки
#include
Аппаратная реализация.
Начнем с того, что кнопку нужно правильно подключить. По правилам построения цифровых устройств, схема подключения должна быть такой
Но устройство AVR контроллеров позволяет упростить схему за счет внутренних ресурсов чипа. В качестве резистора R* можно задействовать встроенный резистор в МК. Правда, это надо будет программно прописать (не забудьте об этом!!!). В конечном варианте схема будет выглядеть вот так:
В схеме так же присутствует кварцевый резонатор с согласующими конденсаторами. Начальный Reset МК так же осуществляется за счет внутренней цепи сброса МК.
Для примера нам потребуется светодиод, подключеный через токоограничивающий резистор 220-330 Ом.
Как видно из схемы, при нажатии кнопки на выходе будет присутствовать низкий логический уровень. А ток через светодиод будет проходить при подаче на выход МК высокого уровня.
Программная реализация.
Простейший случай.
Для того чтобы контроллер мог отслеживать состояние кнопки, он должен в цикле проверять состояние входа. Пусть на линии порта, содержащей кнопку, установлен высокий логический уровень (5В). Тогда при нажатии кнопки (соединении линии порта с землей) линия будет иметь низкий уровень. Это изменение и будет отслеживать наша программа.
Рассмотрим пример, в котором при каждом нажатии на кнопку, светодиод будет менять свое состояние. Для этого организуем цикл.
Алгоритм получился примерно вот такой:
Пояснение: в бесконечном цикле микроконтроллер проверяет состояние своего входа, и в случае обнаружения на нем низкого уровня (замыкание вывода на землю) производит нужные операции.
Дребезг контактов.
Но на практике не все получается так вот красиво и гладко. Все дело в том, что практически не бывает идеальных кнопок. То есть, когда вы нажимаете на кнопку, контакты не сразу занимают нужное положение, перед этим они начинают колебаться, приводя к неоднократному срабатыванию кнопки – это явление называется дребезг контактов. На рисунке показан график того, что примерно происходит на входе контроллера при нажатии кнопки.

Для человека такое время колебания незначительно – мы его даже не заметим. Другое дело, микроконтроллер: предположим, проверка кнопки осуществляется в цикле, а контроллер работает на частоте 8 МГц, в таком случае, проверка кнопки будет осуществляться несколько тысяч, если не десятков тысяч раз в секунду. Может получиться так, (а скорее всего так и получится) что за то время, пока происходит дребезг, программа еще раз проверит кнопку – в таком случае предсказать результат сложно (раз на раз не приходится)
Программный антидребезг
Решить эту проблему можно несколькими путями. В данной статье рассмотрим программный способ. Он заключается в том, что при первом срабатывании кнопки будет вызвана задержка, которой нужно перекрыть время дребезга. После этой задержки будет вновь проверено состояние кнопки. И если там будет ожидаемое значение (например, нажата) то программа выполнит действие по нажатию кнопки.
Алгоритм антидребезга при этом будет выглядеть так:

Важно помнить, что при отпускании кнопки дребезг так же будет происходить!
Ожидание отпускания кнопки.
Предположим, вы нажали кнопку и держите. Программа проверит ее в первый раз – сделает все так, как надо. Обработает антидребезг, выполнит все что нужно. А потом при последующей проверке снова обнаружит, что кнопка нажата – непорядок. Надо сделать так, чтобы программа дождалась отпускания кнопки. Для этого после выполнения нужных от нажатия кнопки действий запускаем цикл, выйти из которого можно будет только при отпущенной кнопке. (Это лишь один из вариантов. он далеко не самый производительный, зато наиболее простой для начинающих) Получается, что пока вы держите кнопку программа не проверяет ее состояние заново. После выхода из этого цикла надо прописать антидребезг (аналогичным образом).
Алгоритм приобретет такой вид:
В плане теории, в общем-то все) Поздравляю, если вы дочитали до этого места!
Пример применения всего вышеописанного.
Как и было заявлено в начале статьи, рассмотрим программу управления светодиодом.
Схема приведена выше.
Алгоритм работы программы следующий:
Реализация данного алгоритма зависит от того, на каком языке вы пишите, и как вы это делаете. В качестве примера привожу реализацию в компиляторе CodeVision AVR
200?"200px":""+(this.scrollHeight+5)+"px");">
/*****************************************************
This program was produced by the
CodeWizardAVR V2.04.0a Evaluation
Automatic Program Generator
© Copyright 1998-2009 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project: Test
Version: 1.0.0.0.1
Date: 20.09.2009
Chip type: ATmega8
Program type: Application
AVR Core Clock frequency: 16,000000 MHz
Memory model: Small
External RAM size: 0
Data Stack size: 256
*****************************************************/
#include
#include
// Declare your global variables here
bit flag = 0;
Void set(){ // функция смены значения на выходе
flag = !flag;
PORTD.4 = flag;
}
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=P State0=T
PORTB=0x02;
DDRB=0x00;
// Port C initialization
// Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State6=T State5=T State4=T State3=T State2=P State1=T State0=T
PORTC=0x04;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=Out Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=0 State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0x10;
// Timer/Counter 0 initialization
// Clock value: Timer 0 Stopped
TCCR0=0x00;
TCNT0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
MCUCR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
While (1)
{
if (PINC.2==0) { // ждем нажатия
if (PINC.2==0) set(); // если все норм, переключаем
else continue;
}
else continue;
While(PINC.2==0) {}; // ждем отпускания кнопки
delay_ms(50); // антидребезг
};
}
В начале в генераторе кода надо сконфигурировать линии портов. На скриншоте указано, что на линию входа необходимо подключить внутренний нагрузочный резистор (поставить Р вместо Т). Об этом резисторе написано выше. Там, где говорилось о вариантах подключения кнопки к контроллеру.
На первом уроке мы научились подавать напряжение ножкой микроконтроллера. Теперь нужно научиться управлять микроконтроллером без перепрошивки.
Зачем это нужно? Например, вы сделали часы на микроконтроллере, нужно выставить время, но очень не удобно каждый раз перепрошивать, когда собьется время. Намного удобнее пользоваться кнопками, например, одной менять часы, другой минуты.
Помните в первом уроке мы настраивали ножку как выход, т.е. мы могли ей подавать напряжение. Так вот, ножку можно настроить как вход. В таком режиме можно проверить есть ли на ней напряжение или нет.
Пример: создаем проект при помощи мастера проектов. Первую ногу настраиваем как выход, вторую как вход. При создании мастером проектов указываем, что ножка PB1 будет входом, на ней же включаем подтягивающий резистор, реализуется это так:

После создания проекта приведем код к такому виду:
| #include |
#include
Как мы видим, по сравнению с первым уроком изменилась настройка порта
if(PINB.1==0) {}
данную строчку нужно читать так — если на ножке 1 порта В подключили землю (0 потенциал), то выполнить код в фигурных скобках. В нашем примере это код из первого урока. Если кнопка не замкнута, то ничего не делать. Промоделировать можно в Proteuse.
Вместо кнопки можно поставить датчик, реле и т.п., вместо светодиода — пищалку, получится сигнализация.
Архив с прошивкой и файлом протеуса доступен
Update1: Зачем нужна подтяжка порта?
У входа мк большое сопротивление, если будут течь даже микротоки вызванные помехами, то по закону Ома U=R*I это может привести к тому, что на входе появится лог 1. Чтобы не было таких проблем в AVR микроконтроллерах можно подключить ножку к плюсу питания, через подтягивающий резистор. В этом случае даже, логика работы меняется наоборот — но если появится помеха, нам это не важно, ведь у нас на входе уже логическая единица.
Почему подключение через резистор? Допустим мы подключили вход к плюсу напрямую без резистора. Когда кнопка сработает, она притянет вход к земле, поэтому на входе будет короткое замыкание между + и землей. Если же стоит резистор, то при замыкании кнопки с одной стороны он так и останется подключен к +, а со второй стороны на нем появится земля от кнопки. Через резистор потечет ток, но его величина будет не такой большой.
Update2: Добавлен тест, в котором вы можете проверить на сколько хорошо вы усвоили материал урока
This movie requires Flash Player 9
Иногда приходится делать очень маленькое устройство, например, велокомпьютер. Или конструктив не позволяет разместить много кнопок. В общем есть у нас одна кнопка на ввод и ничего более.
Спартанские условия, но и тут можно развернуть мощный функционал, многоуровневые меню и прочие прелести жизни. сейчас я покажу одну из реализаций такого управления.
Итак, что у умеет наша кнопка?
- Ее можно нажимать кратко
- Можно жать длинно
- Можно делать разные комбинации нажатий
- Ее можно отпускать в нужный момент
Не густо, но вполне ничего. Для одной кнопки то. Главный затык при написании этого не просрать массу системных ресурсов (время процессора, таймеры и тыды) на обработку этой несчастной кнопки. Ведь нам придется отслеживать факт нажатия, факт отжатия, время нажатия, число нажатий с разным временем. Я видел такие адовые реализации этого интерфейса, что просто диву давался как можно нагородить столько тупняков и тормозов в этой одной сосне, да еще потратить все таймеры:)
Так что ТЗ выставим следующее:
- Никаких аппаратных таймеров, кроме таймера диспетчера.
- Никаких временных задержек, только вызов себя же по таймеру.
- Никаких ожиданий нажатия-отжатия в цикле. Зашли, проверили — отдали управление.
- Введем временной интервал mode_time, в течении которого будем отслеживать комбинацию нажатий. Скажем 2с
- На выходе будем иметь число коротких и длинных нажатий за данный интервал
Алгоритм
Сделаем все на конечном автомате. У него будут три состояния:
- Up — кнопка не нажата
- Dn — кнопка нажата
- Al — кнопка отпущена после длительного нажатия
А также будет одна служебная процедура, которая спустя mode_time (2c) после первого экшна с кнопкой сгребет все результаты и что-нибудь с ними сделает. Что — это уже не важно. От программы зависит.
И вся эта дребедень будет крутиться в цикле, вызывая сама себя через диспетчер (или каким еще образом) раз в 20мс.
Up
Входим.
Смотрим не нажата ли кнопка? Если нет — выходим. Если нажата, то переводим автомат в положение Dn
Проверяем первый ли раз за интервал мы тут? Если первый, то поставим нашу служебную процедуру на отложенный запуск (через 2с), взведем флаг, что процесс пошел.
Выходим.
Dn
Входим.
Еще нажата? Если нет, значит кнопка уже отпущена, скидываемся в состояние в Up и засчитываем одно короткое нажатие, увеличивая счетчик коротких нажатий cnt_s
. Если еще нажата, то щелкаем счетчиком времени замера длительности нажатия Timе. Замер длительности у нас идет в итерациях автомата. Одна итерация 20мс. В лимит длинного нажатия я заложил 20 итераций, что дает около 400мс. Все что больше 0.4с считаем длинным нажатием. Как натикает больше 20 итераций, то засчитываем одно длинное нажатие и перекидываем автомат в состояние Al. Выходим.
Al
Входим.
Еще не отпустили? Если нет, то выходим. Если кнопка отпущена, то перебрасываемся в Up, скинув переменную Time.

За время mode_time, за те две секунды, сколько успеем натыкать — все наше. Запустится процедура анализа собранных данных и разгребет натыканное. Там уже все просто. Банальным case’ом делаем нужный нам экшн. Я вот, например, флажки выставляю которые перехватывает другая задача. Главное не блокировать эту задачу ничем тяжелым, чтобы не прозевать следующую комбинацию.
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 | #include |
#include
Код написан так, что на AVR там завязана буквально пара строчек. По крайней мере в коде обработчика нажатий кнопки. Все привязки на железо идут в хидере, да и их там всего ничего:
| 1 2 3 4 5 6 7 8 9 10 11 | #include |
#include Так что портировать это на другую архитектуру дело смены двух строчек. Ну и, возможно, вам потребуется изменить механизм автозапуска и запуска функции обработчика. Если вы будете использовать какой то свой диспетчер, ОС или еще какую систему организации прошивки. Но это две строчки в коде поправить. Все описанное в статье мясо лежит в двух файлах button.c
и button.h
Видео работы
Дребезг
Варианты
Ну и, разумеется, этот же конечный автомат можно поставить на разбор чего угодно. Например на отслеживание какого-либо другого флажка, от матричной клавиатуры или какого сигнального устройства. В МК ATMega16 есть три таймера/счетчика – два 8-битных (Timer/Counter0, Timer/Counter2) и один 16-битный (Timer/Counter1). Каждый из них содержит специальные регистры, одним из которых является счетный регистр TCNTn (n – это число 0, 1 или 2). Каждый раз, когда процессор выполняет одну команду, содержимое этого регистра увеличивается на единицу (либо каждые 8, 64, 256 или 1024 тактов). Потому он и называется счетным. Помимо него, есть еще и регистр сравнения OCRn (Output Compare Register), в который мы можем сами записать какое-либо число. У 8-битного счетчика эти регистры 8-битные. По мере выполнения программы содержимое TCNTn растет и в какой-то момент оно совпадет с содержимым OCRn. Тогда (если заданы специальные параметры) в регистре флагов прерываний TIFR (Timer/Counter Interrupt Flag Register) один из битов становится равен единице и процессор, видя запрос на прерывание, сразу же отрывается от выполнения бесконечного цикла и идет обслуживать прерывание таймера. После этого процесс повторяется. Ниже представлена временная диаграмма режима CTC (Clear Timer on Compare). В этом режиме счетный регистр очищается в момент совпадения содержимого TCNTn и OCRn, соответственно меняется и период вызова прерывания. Это далеко не единственных режим работы таймера/счетчика. Можно не очищать счетный регистр в момент совпадения, тогда это будет режим генерации широтно-импульсной модуляции, который мы рассмотрим в следующей статье. Можно менять направление счета, т. е. содержимое счетного регистра будет уменьшаться по мере выполнения программы. Также возможно производить счет не по количеству выполненных процессором команд, а по количеству изменений уровня напряжения на «ножке» T0 или T1 (режим счетчика), можно автоматически, без участия процессора, менять состояние ножек OCn в зависимости от состояния таймера. Таймер/Счетчик1 умеет производить сравнение сразу по двум каналам – А или В. Для запуска таймера нужно выставить соответствующие биты в регистре управления таймером TCCRn (Timer/Counter Control Register), после чего он сразу же начинает свою работу. Мы рассмотрим лишь некоторые режимы работы таймера. Если вам потребуется работа в другом режиме, то читайте Datasheet к ATMega16 – там все подробнейше по-английски написано, даны даже примеры программ на С и ассемблере (недаром же он занимает 357 страниц печатного текста!). Теперь займемся кнопками. Если мы собираемся использовать небольшое количество кнопок (до 9 штук), то подключать их следует между «землей» и выводами какого-либо порта микроконтроллера. При этом следует сделать эти выводы входами, для чего установить соответствующие биты в регистре DDRx и включить внутренний подтягивающий резистор установкой битов в регистре PORTx. При этом на данных «ножках» окажется напряжение 5 В. При нажатии кнопки вход МК замыкается на GND и напряжение на нем падает до нуля (а может быть и наоборот – вывод МК замкнут на землю в отжатом состоянии). При этом меняется регистр PINx, в котором хранится текущее состояние порта (в отличие от PORTx, в котором установлено состояние порта при отсутствии нагрузки, т. е. до нажатия каких-либо кнопок). Считывая периодически состояние PINx, можно определить, что нажата кнопка. ВНИМАНИЕ!
Если соответствующий бит в регистре DDRx будет установлен в 1 для вашей кнопки, то хорошее нажатие на кнопку может привести к небольшому пиротехническому эффекту – возникновению дыма вокруг МК. Естественно, МК после этого придется отправить в мусорное ведро… Перейдем к практической части. Создайте в IAR новое рабочее пространство и новый проект с именем, например, TimerButton. Установите опции проекта так, как это описано в предыдущей статье.
А теперь наберем следующий небольшой код. Давайте посмотрим, как это работает. В функциях init_timern задаются биты в регистрах TCCRn, OCRn и TIMSK, причем такой способ может кому-нибудь показаться странным или незнакомым. Придется объяснить сначала, что означает запись «(1 где a – это то число, двоичное представление которого нужно сдвинуть, а b показывает, на сколько битов нужно его сдвинуть. При этом возможна потеря значения, хранящегося в a (т.е. не всегда возможно восстановить из С то, что было в а). Рассмотрим пример: Что окажется в С после выполнения строки C = (22 2 в двоичном коде будет выглядеть как 00010110, а после сдвига влево на 3 бита получим С = 10110000. Аналогично существует и сдвиг вправо. Еще пример: Сначала выполнится действие во внутренних скобках (0xFF – это 255 в шестнадцатеричном коде), из 11111111 получится 11111100, потом произойдет сдвиг вправо и получим С = 00111111. Как видим, здесь две взаимно обратные операции привели к другому числу, т. к. мы потеряли два бита. Этого не произошло бы, если бы переменная С была типа int, т. к. int занимает 16 бит. Теперь рассмотрим еще два битовых оператора, широко применяющиеся при программировании МК. Это оператор «побитовое и» (&) и «побитовое или» (|). Как они действуют, думаю, будет понятно из примеров: Действие: Результат (в двоичном коде):
С = 0; // C = 00000000
C = (1 // C = 00100101
C |= (1 // C = 00101101
C &= (0xF0 >> 2); // C = 00101100
C = (C & 4) | 3; // C = 00000111
Чуть не забыл! Есть еще «побитовое исключающее или» (^). Оно сравнивает соответствующие биты в числе, и, если они одинаковые, возвращает 0, иначе единицу. Вернемся к нашей программе. Там написано «(1 При компиляции программы запись WGM01 просто заменяется на число 3, и в результате получается уже корректная запись. WGM01 называется макросом и он, в отличие от переменной, не занимает места в памяти (разве что в памяти программиста:-). Если заглянуть теперь в Datasheet, но нетрудно будет увидеть, что WGM01 – это имя третьего бита в регистре TCCR0. То же самое касается и остальных битов этого регистра. Это совпадение не случайно и относится ко всем регистрам МК (или почти ко всем). Т. е., написав «(1 Итого, строчка означает, что включен режим СТС, при срабатывании таймера0 меняется состояние «ножки» ОС0 (Она же PB3), содержимое счетчика увеличивается каждые 1024 такта. Аналогично для таймера2: TCCR2 = (1 В регистре TIMSK (Timer/counter Interrupt MaSK register) задается режим прерываний. Мы написали что означает прерывание таймера2 по совпадении TCNT2 и OCR2.
Самая последняя функция – это собственно функция прерывания совпадения таймера2. Прерывания объявляются следующим образом: где ВЕКТОР – это макрос вектора прерывания (по смыслу просто число, характеризующее это прерывание); эти макросы в порядке снижения приоритета перечислены в файле iom16.h. ТИП – тип возвращаемого функцией значения, в нашем случае void (ничего). ИМЯ – произвольное имя для этой функции. С прерываниями мы еще успеем наработаться в будущем. При выполнении нашей функции должны по очереди моргать светодиоды, подключенные к PB0 и PB1. Судя по всему, частота равна 11059200/(256*1024) = 42 Гц. Это быстро, но будет заметно невооруженным глазом. Кстати, применение таймеров дает возможность отсчитывать точные временные интервалы, не зависящие от сложности вашей программы и порядка ее выполнения (но если у Вас не более одного прерывания). Итак, сохраняем файл как «TimerDebug.c», добавляем его в проект, компилируем, прошиваем МК. Что же мы видим?
Светодиод, подключенный к выводу PB3, будет активно моргать, а на PB0 и PB1 нет ни каких изменений. В чем же дело? Неужели что-то неверно? Чтобы это выяснить, придется отладить нашу программу. Поскольку в IAR нет Debuggerа, придется использовать AVR Studio. Эту среду разработки можно скачать с сайта производителя http://atmel.com . Проблем с ее установкой, думаю, не должно быть. Перед запуском AVR Studio выберите в IAR режим Debug и создайте отладочный cof-файл (все опции проекта должны быть выставлены, как описано в предыдущей статье). Открыв AVR Studio, мы увидим окно приветствия, в котором выберем «Open». Теперь лезем в папку с проектом, там в Debug\Exe, выбираем там «TimerDebug.cof», создаем проект там, где предложат, выбираем дивайс ATMega16 и режим отладки Simulator. После этого, если все сделали правильно, сразу же идет процесс отладки Среда отладки здесь очень удобная, т.к. позволяет просматривать содержимое всех регистров МК, а также вручную устанавливать значения для них щелчками мыши. Например, если установить флаг прерывания в регистре TIFR в бите 7 (под черным квадратом в TIMSK), то следующим шагом программы (нажатие F10 или F11) должна быть обработка прерывания (флаг будет установлен автоматически и при совпадении регистров TCNT2 и OCR2). Но, к нашему удивлению, прерывания не будет! Возникает вопрос: почему? Откроем регистр CPU, SREG. Этот регистр определяет работу процессора, а конкретно седьмой его бит (I-бит, Interrupt bit) ответственен за обработку всех прерываний в МК. У нас он не установлен. Стоит его выставить, как сразу же пойдет выполняться прерывание (если одновременно установлен седьмой бит в TIFR). Можно заметить одну интересную особенность: как только процессор уходит в обработку прерывания, этот бит (флаг разрешения обработки прерываний) снимается, а при выходе из функции прерывания вновь автоматически устанавливается. Это не позволяет процессору, не выполнив одного прерывания, схватиться за другое (ведь ориентируется он в программе именно таким образом – по флагам). Значит, нужно добавить строчку кода для установки этого бита в единичное состояние. Добавим мы его в функцию init_timer2. Получится следующее: Теперь, выбрав конфигурацию Release и прошив МК нажатием F7 и запуском AVReal32.exe, с радостью увидим, что все работает как надо. Замечание:
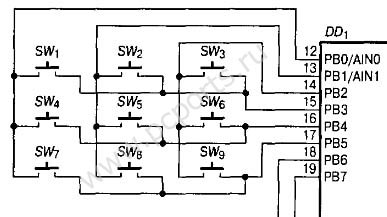
при отладке программы следует уменьшать интервалы таймеров, если они слишком длинные, т. к. в процессе отладки в AVR Studio программа выполняется в тысячи раз медленнее, чем внутри МК и вы не дождетесь срабатывания таймера. В целом отладка полностью аналогична таковой в других системах программирования, таких, как Visual C++. Теперь, научившись отлаживать программы, создадим в IAR новый файл (а старый сохраним и удалим из проекта) и наберем следующий код: Сначала предлагаю взять уже готовый файл прошивки (файлы к статье, папка Release, файл TimerButton.hex или откомпилировать этот текст) и записать его в МК. После чего вынуть кабель прошивки, подключить к PC0 и PC1 кнопки и попробовать их понажимать. Увидим, что при нажатии на одну из кнопок увеличивается регистр PORTB (загораются светодиоды), а при нажатии на другую – уменьшается. Если не работает – попробуйте понажимать одну кнопку, удерживая другую – будет действовать. Дело в том, что я подключал кнопки следующим образом: при нажатии на кнопку вывод МК «болтается» в воздухе, а при отпускании замыкается на землю. Если вы подключили кнопки по-другому, то придется лишь чуть модернизировать программу. Давайте разберемся с кодом. Здесь работа с таймером организована несколько иначе. Он срабатывает каждые 11072 такта (то есть каждые 1,001175 мс) и увеличивает содержимое переменной counter. Есть еще функция delay(long unsigned int Pause_ms), которая берет в качестве параметра количество миллисекунд Pause_ms, сбрасывает counter и ждет, когда counter достигнет значения Pause_ms, после чего продолжает работу МК. Таким образом, написав delay(1500), мы сформируем задержку в программе в 1,5 секунды. Это очень удобно для формирования временных интервалов. С таймером вроде все понятно. Но для чего он используется? Рассмотрим бесконечный цикл while(1) в main(). В этом цикле проверяется состояние кнопок путем анализа содержимого регистра PINB. А зачем там стоит задержка на 50 мс? Это устранение т. н. «дребезга клавиш». Дело в том, что при нажатии на кнопку происходит удар одного контакта о другой, и, поскольку контакты металлические, удар этот упругий. Контакты, пружиня, замыкаются и размыкаются несколько раз, несмотря на то, что палец сделал лишь одно нажатие. Это приводит к тому, что МК фиксирует несколько нажатий. Давайте рассмотрим график зависимости напряжения на выходе PC0 от времени. Он может выглядеть так: Точка А – момент нажатия кнопки. Он может быть зафиксирован МК. Затем идут несколько замыканий и размыканий (их может и не быть, а может быть и 12 штук – это явление можно считать случайным). В точке B контакт уже надежно зафиксирован. Между A и B в среднем около 10 мс. Наконец, в точке D происходит размыкание. Как же избавиться от этого неприятного явления? Оказывается, очень просто. Нужно зафиксировать момент нажатия кнопки (точка А), через какое-то время, например, 50 мс (точка С) проверить, что кнопка действительно нажата, сделать действие, соответствующее этой кнопке и ждать момент ее отпускания (точка D). То есть нужно сделать паузу от А до С, такую, чтобы весь «дребезг» оказался внутри этой паузы. А попробуйте теперь убрать строчку, формирующую задержку, откомпилировать программу и зашить ее в МК. Путем простых нажиманий на кнопки сможете легко убедиться, что все эти «мучения» не были напрасными. А что же делать, если к МК нужно подключить, скажем, 40 кнопок? Ведь у него всего лишь 32 вывода. Казалось бы, никак. На самом деле это возможно. В таком случае используют алгоритм, называемый стробированием. Для этого нужно кнопки соединить в виде матрицы, как это показано на рисунке (рисунок взят из книги Мортона «МК AVR, вводный курс», где написано про программирование AVR на ассемблере). При подаче на вывод PB0 лог. 1 (+5В), а на выводы PB1 и PB2 лог. 0 разрешается обработка кнопок 1, 4 и 7. После этого состояние каждой из них можно узнать, проверив напряжение на одном из выводов PB3..PB5. Таким образом, подавая последовательно на выводы PB0..PB2 лог. 1, можно определить состояние всех кнопок. Понятное дело, что выводы PB0..PB2 должны быть выходами, а PB0..PB2 входами. Чтобы определить, какое количество выводов потребуется для массива из Х кнопок, нужно найти пару сомножителей Х, сумма которых наименьшая (для нашего случая с 40 кнопками это будут числа 5 и 8). Это означает, что к одному МК можно подключить до 256 кнопок (а с применение дешифраторов и того больше, но о дешифраторах потом). Лучше сделать меньшее число выводов выходами, а большее – входами. В этом случае опрос всех строк матрицы займет меньше времени. Подобный способ подключения (стробирование) свойственен не только для кнопок. Там можно подключать самые разнообразные устройства, начиная от матриц светодиодов и заканчивая микросхемами flash-памяти. © Киселев Роман
Боротся с дребезгом тут уже не обязательно. Т.к. частота сканирования небольшая, так что даже голимая и наглухо окисленная кнопка модели ТМ2 не давала дребезга — он кончался раньше, чем наступал следующий скан. А вот что тут можно докурить, так это защиту от ложных сработок в результате наводок. Ведь стоит помехе продавить линию в момент считывания и засчитается сработка однократного нажатия. Это можно избежать сделав проверочные состояния автомата. Скажем добавив в Up счетчик итераций, чтобы в течении, скажем, двух-трех итераций подтвердить, что кнопка таки нажата и только тогда переходить в Dn.
Правда в своем проекте я несколько изменил обработку. Т.к. мне не нужны были множественные длинные нажатия, то я сделал выставление флага «Длинное нажатие» сразу же в обработчике AL и, заодно, убрал подсчет числа длинных нажатий. Что позволило повысить отзывчивость работы интерфейса прибора, где длительным нажатием осуществлялся вход в пункт меню, а комбинаций с двумя длинными нажатиями не использовались вообще. 




Июнь 2007